Схема подключения
В данном разделе показано, как устроена электрическая часть учебного CubeSat и как отдельные модули объединяются в единую систему.
Система построена вокруг Arduino Nano, который выполняет роль бортового компьютера и связывает между собой датчики, модуль связи, систему хранения данных и средства индикации.
Два уровня описания:
Структурная блок-схема — из каких подсистем состоит учебный CubeSat.
Схема подключения модулей — к каким пинам Arduino Nano подключён каждый компонент.
Подсистемы учебного CubeSat
EPS — Electrical Power System
EPS (Electrical Power System) — система питания учебного CubeSat.
Она включает:
источник питания;
распределение напряжения 5V и 3.3V;
питание Arduino Nano и подключённых модулей;
питание датчиков, радиомодуля, GPS и системы индикации.
Основная задача EPS — обеспечить стабильное питание всех подсистем набора.
OBC — On-Board Computer
OBC (On-Board Computer) — бортовой компьютер спутника.
В данном наборе его роль выполняет Arduino Nano. Он отвечает за:
опрос датчиков;
обработку измерений;
запись телеметрии на карту памяти;
передачу данных по радиоканалу;
управление индикацией и звуковым маяком.
Arduino Nano является центральным узлом всей системы.
COM — Communication System
COM (Communication System) — система связи учебного CubeSat.
В наборе для передачи телеметрии используется модуль nRF24L01+. Он позволяет передавать данные с бортового компьютера на наземную станцию.
Через подсистему COM могут передаваться:
показания датчиков;
координаты GPS;
служебная телеметрия;
состояние питания и работы системы.
ADCS — система определения ориентации
ADCS (Attitude Determination and Control System) — упрощённая система определения ориентации.
В учебном наборе она предназначена не для активного управления положением спутника, а для оценки его положения и ориентации в пространстве.
В состав ADCS входят:
MPU9250 — измерение ускорения, угловой скорости и магнитного поля;
GPS-модуль — координаты, скорость и время;
солнечные панели / датчики освещённости — при наличии могут использоваться как простейшие ориентиры относительно Солнца.
Эта подсистема позволяет проводить эксперименты по оценке движения и ориентации.
PAYLOAD — полезная нагрузка
PAYLOAD — полезная нагрузка учебного CubeSat: модули для экспериментов и сбора данных.
В состав полезной нагрузки входят:
BME280 — температура, давление и влажность;
CCS811 — параметры качества воздуха и газовой среды.
Эти датчики позволяют выполнять учебные эксперименты и собирать данные об окружающей среде.
Примечание
Модуль microSD в прямом смысле не является полезной нагрузкой — это подсистема хранения данных для записи телеметрии и результатов измерений.
Логика соединения подсистем
Все подсистемы соединяются через Arduino Nano:
датчики MPU9250, BME280 и CCS811 — шина I2C;
nRF24L01+ и microSD — шина SPI;
GPS GY-NEO-6M — UART: в прошивке main_full используется аппаратный
Serial(D0 = RX), скорость 9600 baud;buzzer и адресная LED-лента — цифровые пины Arduino;
питание модулей распределяется через подсистему EPS.
Структурная блок-схема
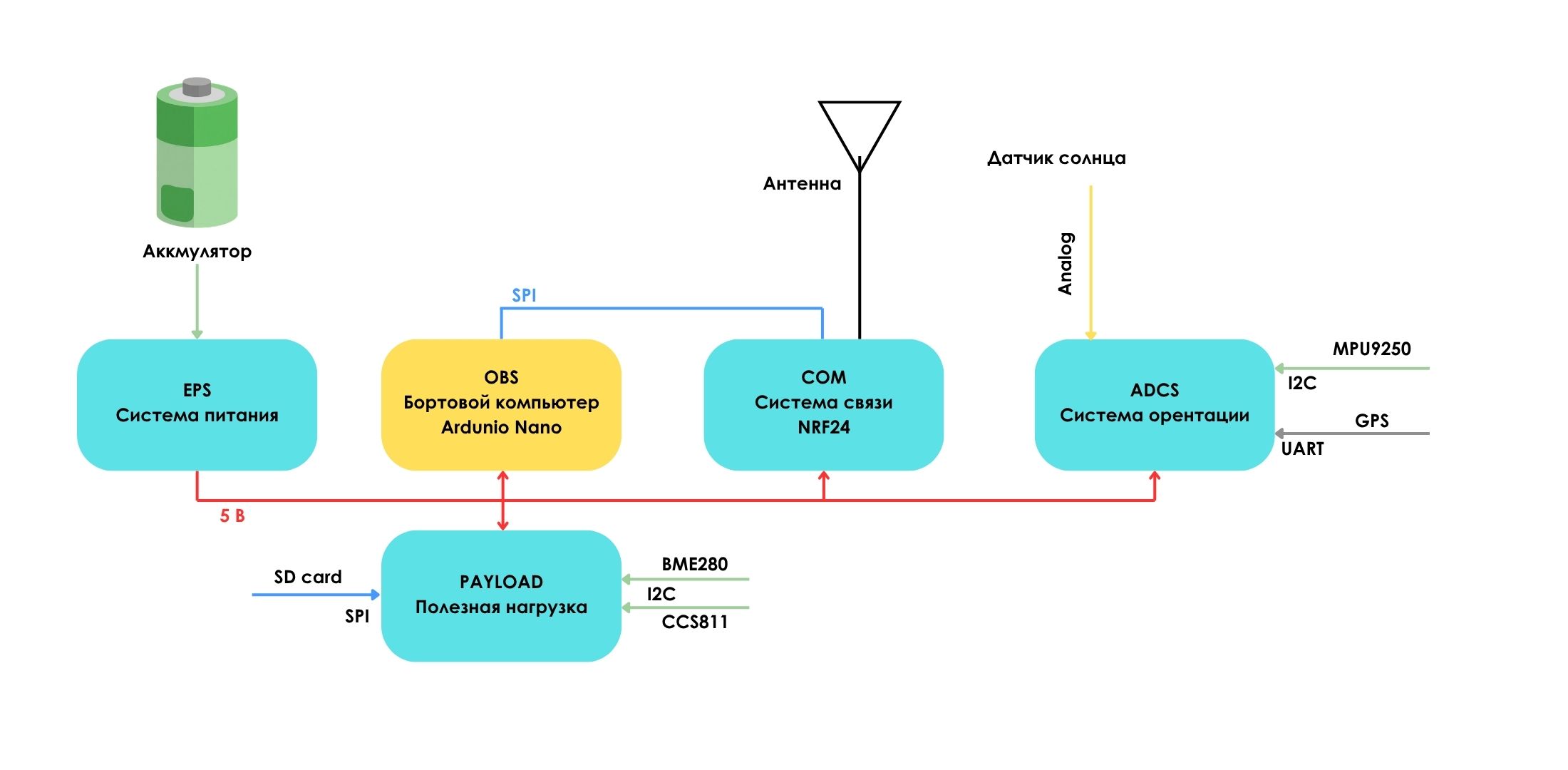
Структурная блок-схема подсистем учебного CubeSat.
Схема подключения модулей (макет / Fritzing)
Ниже — электрическая схема подключения модулей к Arduino Nano (экспорт из проекта
Fritzing, файл CubeSat.fzz в корне репозитория).
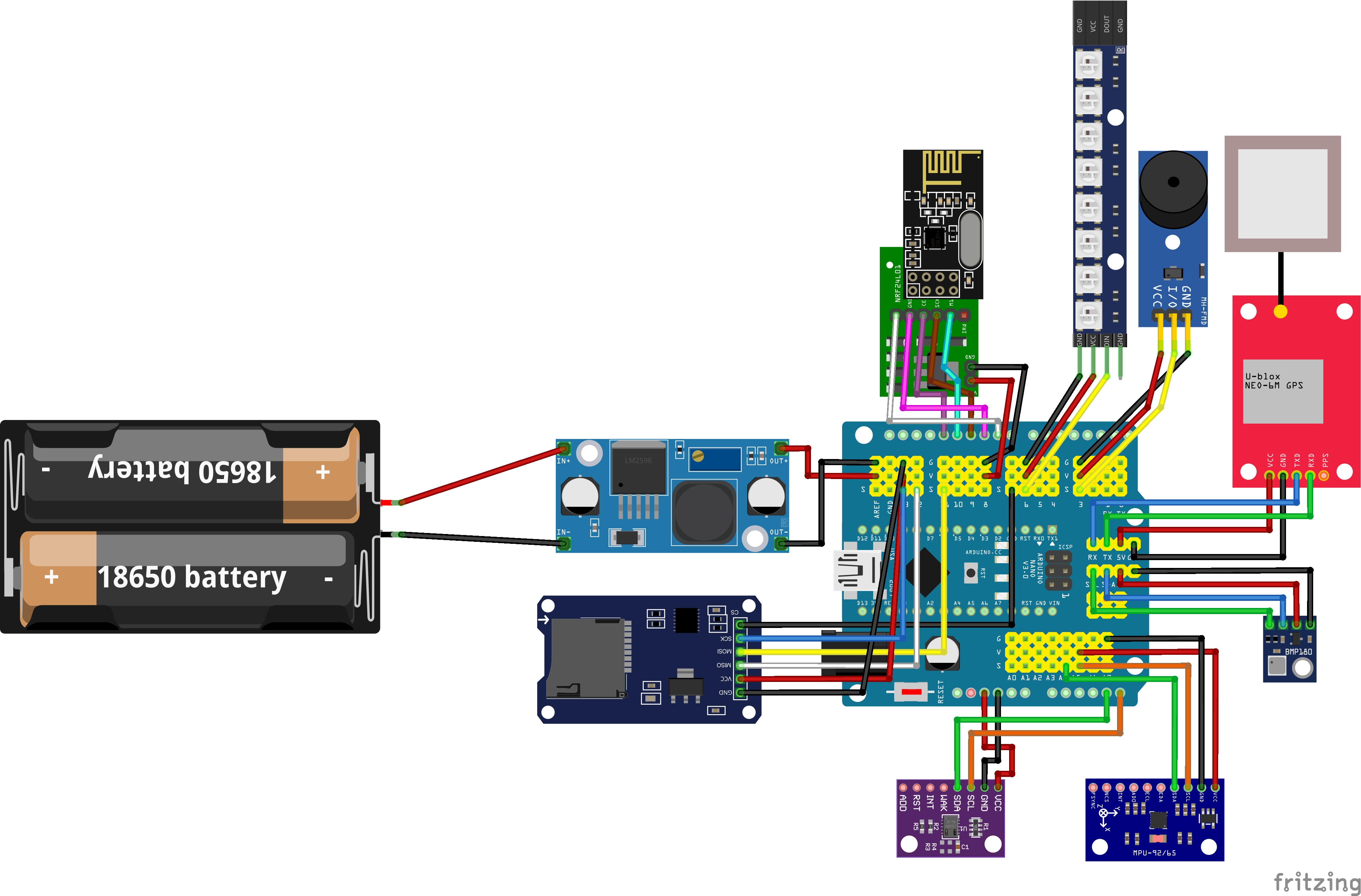
Схема подключения модулей учебного CubeSat.
Основные интерфейсы подключения
I2C — датчики:
MPU9250
BME280
CCS811
SPI — модули:
nRF24L01+
microSD module
UART — GPS GY-NEO-6M на D0 (см. прошивку main_full).
GPIO — зуммер и адресная LED-лента (WS2812).
Радиоканал: nRF24L01+ по SPI, библиотека RF24 (в коде PIN_NRF_CE,
PIN_NRF_CS).
Примечания по подключению
Общая GND для всех модулей.
nRF24L01+ — только 3.3 V на модуль (не 5 V) и стабильное питание.
Общая SPI-шина для microSD и nRF: разные линии выбора чипа — CS карты = D4, CSN nRF = D10.
На I2C линии SDA/SCL общие; устройства с разными адресами.
Линии IRQ nRF и nINT CCS811 в main_full не используются (как и опциональный IRQ на D2 в README).
Как реализовать подключение — прошивка main_full
Цепочка в монтаже:
Источник питания -> Arduino Nano (+ модули питания для 3.3 V) -> I²C / SPI / Serial / GPIO
Главный принцип: сначала питание и общая земля, затем сигналы.
Предупреждение
Перед прошивкой Arduino отключите GPS (или отсоедините провод TX GPS → D0).
На Nano/Uno пин D0 — это RX0 аппаратного Serial: во время загрузки
скетча загрузчик и USB-UART используют ту же линию. Если GPS продолжает держать
D0, прошивка может не записаться или вести себя непредсказуемо.
План питания
Общая GND.
nRF24L01+ — строго 3.3 V (отдельный модуль питания для nRF — по комплекту).
Остальные модули — по даташитам плат (GPS, SD, датчики); часто на модулях есть собственный регулятор с 5 V входа).
Распиновка main_full: цифровые пины
Константы в коде: PIN_SD_CS = 4, PIN_NRF_CE = 9, PIN_NRF_CS = 10,
PIN_LED = 6 (WS2812), PIN_BUZZ = 3.
Пин Arduino |
Назначение в прошивке main_full |
|---|---|
D0 (RX) |
Приём от GPS NEO-6M: TX модуля GPS → D0, |
D1 (TX) |
Линия UART к ПК при прошивке и |
D3 |
Зуммер активный: в коде LOW = звук, неактивно — HIGH. |
D4 |
CS карты microSD (SPI). |
D6 |
Данные WS2812, в коде 8 светодиодов (NUM_LEDS). |
D9 |
CE модуля nRF24L01+. |
D10 |
CSN (chip select) модуля nRF24L01+. |
Распиновка main_full: SPI (общая шина SD + nRF)
Библиотека RF24, шина SPI классическая для Nano/Uno:
Сигнал |
Пин Arduino |
|---|---|
MOSI |
D11 |
MISO |
D12 |
SCK |
D13 |
CS (SD) |
D4 |
CSN (nRF) |
D10 |
CE (nRF) |
D9 |
Питание nRF |
3.3 V (не подавать 5 V на модуль nRF) |
Распиновка main_full: I²C (Wire)
Пин |
Назначение |
|---|---|
A4 |
SDA |
A5 |
SCL |
Устройство |
Адрес |
Примечание |
|---|---|---|
MPU-9250 / MPU-9255 |
0x68 или 0x69 |
Выбор автопоиском по WHO_AM_I; на плате часто переключатель AD0. |
BME280 |
0x76 |
В коде зафиксирован |
CCS811 |
0x5A |
Вариант с выводом ADDR на GND. |
Подключение по модулям (под main_full)
Nano + Shield — доступ к 5 V, 3.3 V, GND.
I²C — датчики на A4/A5, адреса как в таблице выше.
nRF24L01+ — SPI и CE/CSN как выше; питание только 3.3 V.
microSD — общий SPI; CS на D4.
GPS — TX GPS → D0, скорость 9600. Перед прошивкой — отключить GPS от D0.
Зуммер — D3 (активный, логика LOW/HIGH как в коде).
WS2812 — линия данных на D6.
Приёмник на ESP32 (кратко)
Для прошивок вроде main_esp32_nrf_rx / main_esp32_gps_web типичная привязка nRF:
SPI VSPI — SCK=18, MISO=19, MOSI=23, CSN=4, CE=2 (как в исходниках;
уточняйте по своему .cpp).
Порядок первого запуска
Мультиметром проверить отсутствие КЗ между
VCCиGND.При необходимости отключить GPS от D0, прошить скетч main_full, снова подключить GPS (если используете загрузку через USB с подключённым модулем — см. предупреждение выше).
Подать питание без радиомодуля (при отладке), проверить старт Nano.
I²C-сканером или логикой прошивки проверить датчики.
Проверить SPI: SD (CS=D4) и nRF (CSN=D10, CE=D9) при общей шине.
Проверить GPS (TX→D0, 9600) и при необходимости приёмник ESP32 по каналу/пайпу из README.
Мини-чеклист перед эксплуатацией
Полярность питания проверена.
Все земли объединены.
Для SPI у каждого устройства свой
CS.Для nRF24L01+ — отдельное стабильное
3.3V.Пины совпадают с кодом прошивки.